Квадрокоптер
Текущий статус:допиливание софта до стабильного полета. Заморожен.
Конструкция квадрокоптера привлекла меня своей внешней простотой и отсутсвием какой-либо механики кроме моторов. Решено было собрать этот летательный аппарат. Существует довольно много различных готовых конструкций квадрокоптеров. Их можно разделить на игрушки, типа AR.Drone, управляемого с телефона и недорогих микроаппаратов как попадаются на DealExtreme и на более-менее взрослые системы типа Mikrocopter и AeroQuad. Причем из последних можно насчитать около 6 неплохо летающих проектов.
Самым профессиональным считается немецкий Mikrocopter, видимо, из-за того что проект самый старый и проверенный. Именно на данной платформе собирается большая часть тяжелых леталок, призванных в дальнейшем таскать на себе дорогую фото-видео технику. Однако, у немцев несколько устаревшая аппаратная база, дорогие I2C контроллеры двигателей и большие ценники. Да и вообще закрытая это разработка.
С AeroQuad проще, он основывается на Arduino, так что просто обязан быть открытым. Исходники имеются и по-идее без проблем собираются. По ним я исследовал некоторые механизмы функционирования и применяемые решения. К примеру, удостоверился, что для управления используется обычный PID-регулятор, без каких-либо дополнительных наворотов.
Еще мое внимание привлек проект AutoQuad. Но данный проект пока является закрытым, хотя автор обещает открыть схемы и исходники в недалеком будущем. В первую очередь он интересен из-за того, что в его основе мощный микроконтроллер на ядре Cortex-M3 (а предыдущие основываются на 8 битных AVR). Это позволяет не особо задумываться над запасом производительности и обрабатывать полетную информацию с меньшей периодичностью.
Собственно, завязываться за закрытые проекты или вычислительно слабенькую платформу типа AVR очень не хотелось, да и вообще мне важен и сам процесс разработки. По этой причине был выбран вариант с разработкой своего велосипеда своей аппаратной платформы.
Составные части проекта:
- Плата управления.
- Плата датчиков (опционально).
- Стенд тестирования модельных двигателей.
- Плата OSD и телеметрии.
Платформа
Для квадрокоптера была выбрана следующая начинка:
- Мозг: плата управления на LPC134x собственной разработки.
- Моторы: Turnigy FC 28-12 1534kV.
- Регуляторы: HK SS 18-20A ESC.
- Аккумулятор: B-Grade 5000mAh 3s 15C.
- Пропеллеры: GWS 8x4.
Это первая итерация квадрокоптера. В данном варианте основной упор был сделан на цену: все комплектующие максимально дешевые, так как изначально планировалось в основном тестирование и проверка всех принципов работы. В погоне за дешевизной все-таки произошло 2 промаха:
- Регуляторы довольно низкого качества, почему-то было 2 случая с летальным исходом для ключей. Дохнут в момент подключения аккумулятора. Позже добавил дополнительный конденсатор по питанию, вроде бы помогло. В дальнейшем планирую переход на Turnigy Plush 18A.
- Аккумуляторы B-Grade низкого качества. По ощущениям не отдают заявленную емкость, хотя заряжаются как положено, беря в себя 5000-5500мАч. На HK про них и описывают, как низкокачественные, но я просто выбрал самое дешевое емкостью 5Ач на 3 банки, даже не читая описания. Для тестов аккумулятор подойдет, но в дальнейшем планирую замену на качественный Turnigy nano-tech 4500mAh или даже меньшей емкости.
Выбранные моторы оставляют у меня самые приятные впечатления. Учитывая их цену - довольно неплохой выбор. Здесь представлены тесты данных двигателей. Конечно, эффективность не самая лучшая, но по максимальной тяге они очень хороши. Далее планируется переход на двигатель hacker style 20-28M, но для него в начале будут произведены соответствующие замеры тяги и эффективности (а они обещают быть лучше чем у текущего двигателя) и устанавливаться он будет на новую раму с несколько увеличенной длиной лучей.
Рама
В качестве рамы был выбран простейший вариант: алюминиевый квадратный профиль 12х12мм, составленный перектестием и фиксация пластиной по центру. Стоит заметить, что 2 профиля выпиливаются таким образом, чтобы вставиться друг в друга, таким образом достигается максимальная прочность. Еще увеличить прочность рамы можно, если добавить болт по центру, непосредственно в перекрестие. Но в данном случае он мешается аккумулятору.
Первый вариант рамы:

Можно заметить несколько странное использование пропсейверов для крепления пропеллеров. Собственно функция пропсейвера здесь как таковая не нужна, а в таком виде крепление надежнее: меньше нагрузка на резиновое кольцо, как следствие меньшая вероятность что оно порвется, а если и порвется, пропеллер никуда не денется. Мало того, получается компактнее, т.к. пропеллер прилегает непосредственно к корпусу двигателя.
При заказе плат, была заказана и центральная часть. Она так же выполняет функцию распределения питания на 4 регулятора. Сами регуляторы размещены на лучах, припаяны непосредственно в центарльную плату. С них сняты провода к двигателю и выводы последних напаяны непосредственно на регуляторы:

Плата крепления установлена только одна, нижняя не потребовалась, жесткости и прочности и жесткости хватает (текстолит 1.5мм). Так же можно заметить наличие датчика тока (в моем варианте датчик на эффекте Хола на 100А. Далее установка платы контроля и подключение всех соединений:

И конечный вариант с установленной батареей:

Крупным планом центр квадрокоптера. Стоит заметить, что от приемника идет только один провод, это съем сигнала PPM, очень удачно, что на приемниках HK 2.4GHz 6ch он выведен на канал BAT (стоит заметить, в приемнике Turnigy 8ch данный сигнал я найти так и не смог):
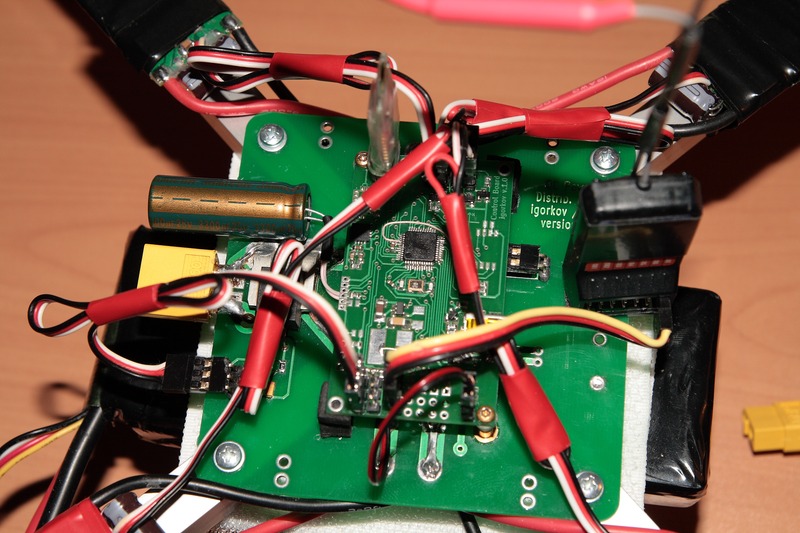
Так же виден электролит по питанию, без него по непонятным причинам вылетали регуляторы.
Расчетные характеристики:
- Вес (аккумулятор B-Grade 5000mAh 3s): ~850 грамм.
- Тяга двигателей в пике: ~2400 грамм (почти 3 собственных массы).
- Ток: до 55А.
- Ток на висение: ~15А.
- Расчетное время полета: до 20 минут.
Первые полетные тесты
Отстройка регуляторов:
По большому счету в текущий момент идет сплошная "колбасня". Реакция есть, но она никак не состыковывается с воздействиями. Решил провести более глубокие эксперименты в эмуляторе, а так же разработать набор утилит для RealTime анализа данных.