Плата управления на LPC134x

Компактная минимальная плата для микроконтроллера LPC134x. Заточена под использование в радиоуправляемых моделях в качестве бортового компьютера. Конкретно призвана выполнять функции логгера, системы стабилизации и даже автопилота. На плате предусмотрен минимальный набор датчиков для реализации гировертикали (прибора, способного гарантированно выдавать углы крена/тангажа). Так же содержит разъем USB для простого соединения с компьютером, через этот же разъем возможно прошивать микроконтроллер, при этом не требуется никаких специальных утилит, только простейший файловый менеджер. Если требуется определять курс (положение относительно магнитных полюсов), а так же высоту над уровнем моря существует расширенная плата датчиков.
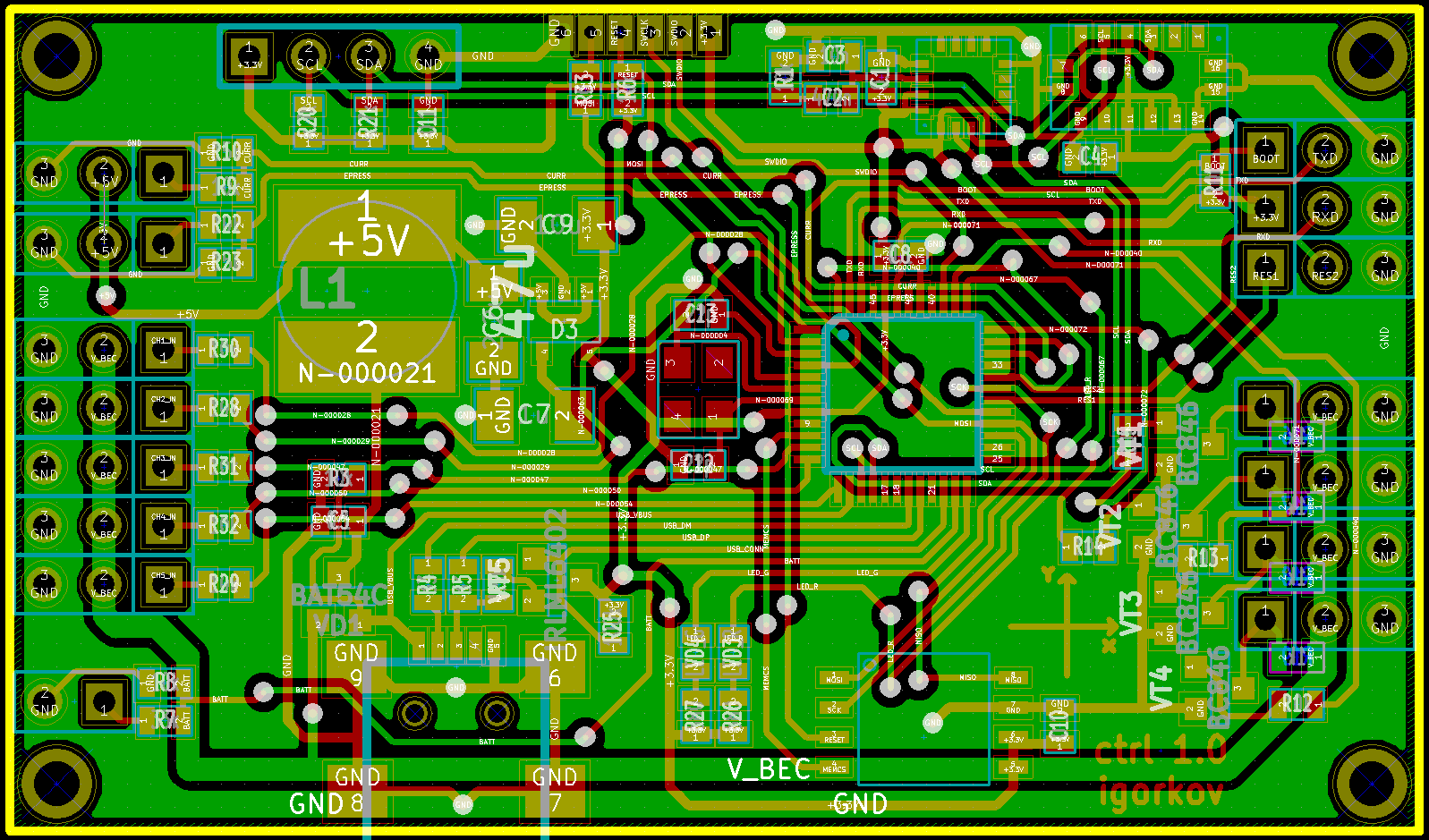
Состав платы:
- Микроконтроллер NXP LPC134x.
- Микросхема FLASH-памяти AT45DBxx.
- Гироскопический MEMS датчик ST L3G4200 (3х осевой).
- Акселерометр LIS3LV02 (3х осевой).
- Набор портов ввода-вывода оптимизированный под использование в RC-проектах.
- Опционально предусмотрен интерфейс SWD для отладки кристалла.
На плате отлажены:
- Аналоговые входы.
- Модуль светодиодов.
- Интерфейс I2C для общения с датчиками.
- Непосредственная работа с датчиками, чтение показаний.
- Тестовые варианты IMU-системы (работает гировертикаль).
- Работа IMU на 9 размерностей (MARG ядро с задействованием магнитного сенсора).
- Интерфейс UART для общения с внешними модулями, включая GPS.
- Интерфейс USB, профиль HID на встроенном в LPC1300 USB-драйвере.
- PPM input (сигнал с приемника аппаратуры радиоуправления, поддержка 8 каналов)
- Захват 5ти каналов управления с приемника.
- Генерация сигналов для сервомашинок.
- Порт открытой программы гироскопа GA-250.
- Реализована работа с микросхемой SPI FLASH-памяти серии AT45 на уровне секторов.
- Работа с микросхемой I2C EEPROM.
В очереди:
- Отладка PID-регулятора для квадрокоптера.
- Продвинутые алгоритмы фильтрации показаний с датчиков.